zamieszczony opis sterownika dotyczy sterowania unipolarnego...
a comprehensive design to a four-channel unipolar stepper drive with complete interface electronics [RS232C] for direct operation from a standard PC
tranzystory mogą sterować większym prądem... ale przy bardzo prostym sterowaniu
straty mocy w rezystorach ustalających prąd są znaczne...
The stepper motor drive scheme used is a resistance-limited unipolar drive...
However, it does suffer from inefficiency due to power dissipated in the ballast resistors.
The ballast resistors are used to limit the current through the phase winding, but inevitably will dissipate power. The resistor values shown should be calculated for the specific stepper motor used.
czy max prąd 1A wynika z płytki PCB(czyli jak dam jakiś drucik na ścieżkę to wytrzyma i z 3A?)czy wina tranzystorów
ograniczenie prądu wynika głównie z mocy strat w rezystorach ustalających prąd...
te rezystory trzeba wyliczyć dla wybranego silnika... i znaleźć takie o wystarczającej mocy strat
właśnie DUŻA MOC STRAT w rezystorach ustalających prąd ogranicza największy prąd takiego prostego sterownika...
można oczywiście zmodyfikować samą końcówkę tak, aby moc strat wydzielała się w samym tranzystorze kluczującym - tak jak to jest w projekcie:
http://forum-cnc.pl/index.php/topic,1403.0.html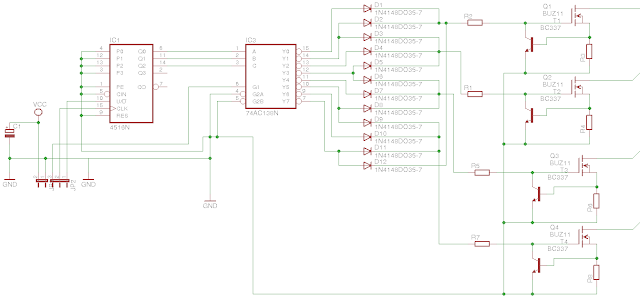
z tranzystora łatwiej odprowadzić większą ilość ciepła
czy jest pod to jakiś program który chociaż interpretuje g-kody na posuw
tworzenie nowego kontrolera ruchu to trochę trudne zadanie... a przy komunikacji przez RS232C właściwie nie możliwe (no może gdy kontroler ruchu jest w jednoukładowcu)
lepiej przedstawiony układ poddać kontroli LPT... albo zastąpić innym projektem
istnieje wiele bardzo dobrych kontrolerów ruch zawiadujących sterownikami silników przez LPT:
mach2/3, EMC2, turbocnc....