moment silnika w zależności od podziału kroku
w sterowniku bez ukrytych tajemnic - np. A3977, imt901/ta8435, lmd18245
taka zalezność istnieje
głównym czynnikiem ograniczającym moment silnika krokowego przy wzroście prędkości jest indukcyjność faz...
indukcyjność - to miara "niechęci" prądu do narastania
brak szybkiego przemagnesowaywania w silniku krokowych - doprowadza do nie pełnej magnetyzacji faz -> co w konsekwencji prowadzi do spadku momentu silnika
patrząc na oscyloskop na prąd fazy silnika przy wzroście prędkości (sterowanie mikrokrokowe)
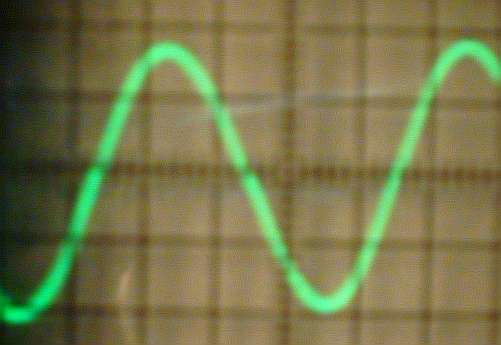
sinusoida zaczyna chudnąć - a chudnięcie to brak pełnej magnetyzacji...
w pewnym momencie sinusoida zamienia się w trójkąt...

a potem amplituda trójkąta zaczyna maleć... wtedy moment maleje już bardzo szybko...
przy sterowniu pełnokrokowym - prędkośc maksymalna będzie wyższa
ponieważ wymuszenie magnetycacji jest silniejsze
sinusoida (przy sterowniu mikrokrokowym) zaczyna chudnąć
a prostokąc (przy sterowaniu krokowym) dopiero zaczyna przypominać "grubą" sinusoidę
w zakresie większych prędkości - sterownie pełnokrokowe zapewnia pełniejszą magnetyzacje
a co za tym idzie - wolniejszy spadek momentu
w bardziej złożonych sterownikach (m542, m880)... co widać w osiągach
stosowane są różne "sztuczki" aby poprawić prędkość maksymalną przy sterowniu mikrokrokowym...
jedna ze znanych sztuczek - to tzw.
morfing kroku
polega to na przełączeniu sterowania mikrokrokowego na prełnokrokowe powyżej pewnej prędkości...