L6470 scalony sterownik 7A (3A rms) 45V krok=1/128
L6470 scalony sterownik 7A (3A rms) 45V krok=1/128
Features:- Operating voltage: 8 - 45 V
- 7.0 A output peak current (3.0 A r.m.s.)
- Low RDSon power MOSFETS
- Programmable speed profile and positioning
- Programmable power MOS slew-rate
- Up to 1/128 microstepping
- Sensorless stall detection
- SPI interface
- Low quiescent and standby currents
- Programmable non dissipative overcurrent protection on high and low-side
- Two levels overtemperature protection
- Miniaturized and thermally enhanced
- packages: QFN7X7-48, HTSSOP28 and POWERSO36
Many advantages:- System is heavily simplified
- No more dedicated μC to perform speed profile and positioning calculations
- A lot less passive components
- Better performance
opis:
http://www.st.com/stonline/products/literature/ds/16737.pdf
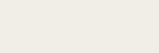
The L6470 dSPIN motor driver, using analog and mixed-signal technology, is an advanced fully integrated solution suitable for driving 2-phase stepper motors with micro-stepping. It integrates a dual low RDS(on) DMOS full bridge with all of the power switches equipped with accurate on-chip current sensing circuitry suitable for non-dissipative current control and overcurrent protection. A unique control system ensures a true 1/128 step resolution is achieved.
The digital control core can generate user defined motion profiles with acceleration, deceleration, speed or target position easily programmed through a dedicated register set. All commands and data registers, including those used to set analog values (such as current control value, current protection trip point, dead time, PWM frequency) are sent through a 5 Mbit/s SPI.
A rich set of protection features (thermal, low bus voltage, overcurrent, motor stall) allows the design of fully-protected applications, as required by the most demanding motor control applications.
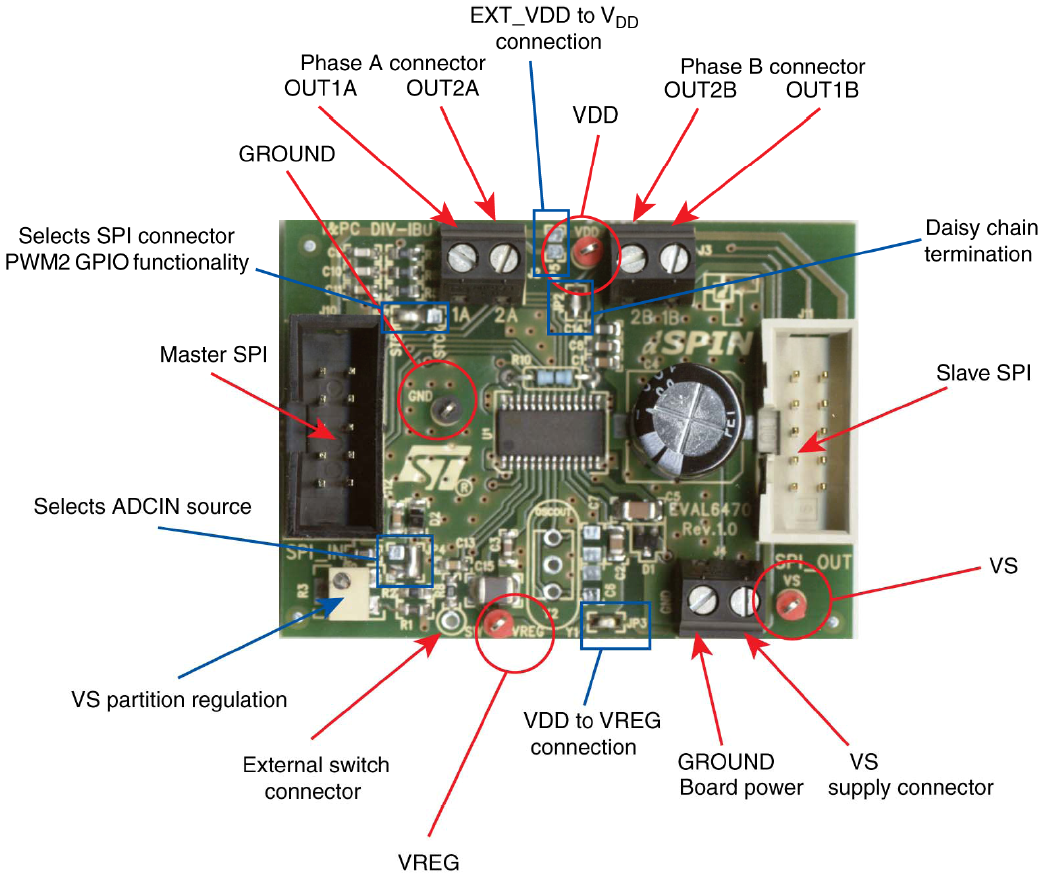
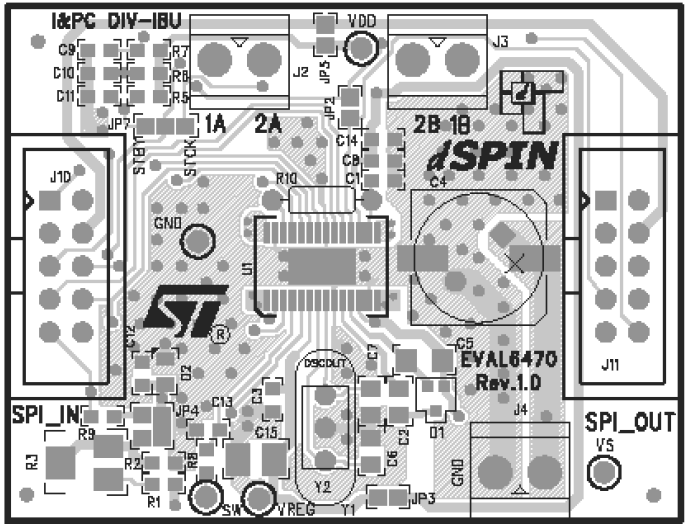
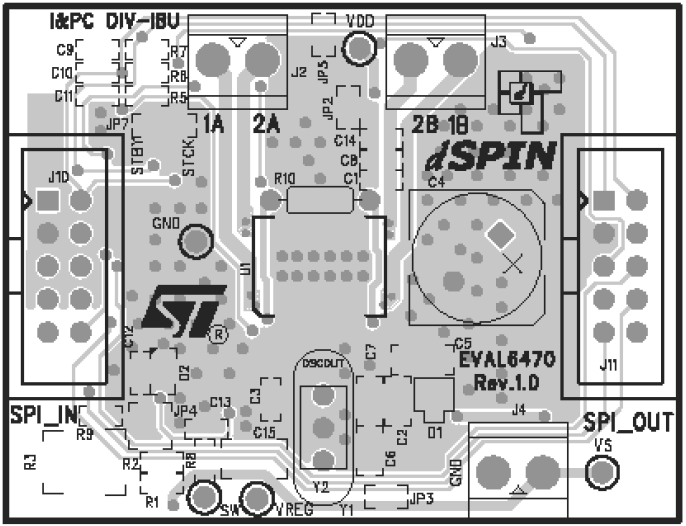
EVAL6470 demonstration board